
This article was written in 2022 in Chinese. It was translated and edited for English readers. The content below represents the original work and has been archived since May 2022.
Overview
The Hyaena project is a quadruped bionic robot dog built on Raspberry Pi and Arduino platforms. It was originally designed to assist humans in environments unsuitable for direct operation—conducting exploration, inspection, and completing basic tasks.
At its current stage, Hyaena can perform fundamental locomotive behaviors including standing and running. All structural design and programming were independently developed by our team.
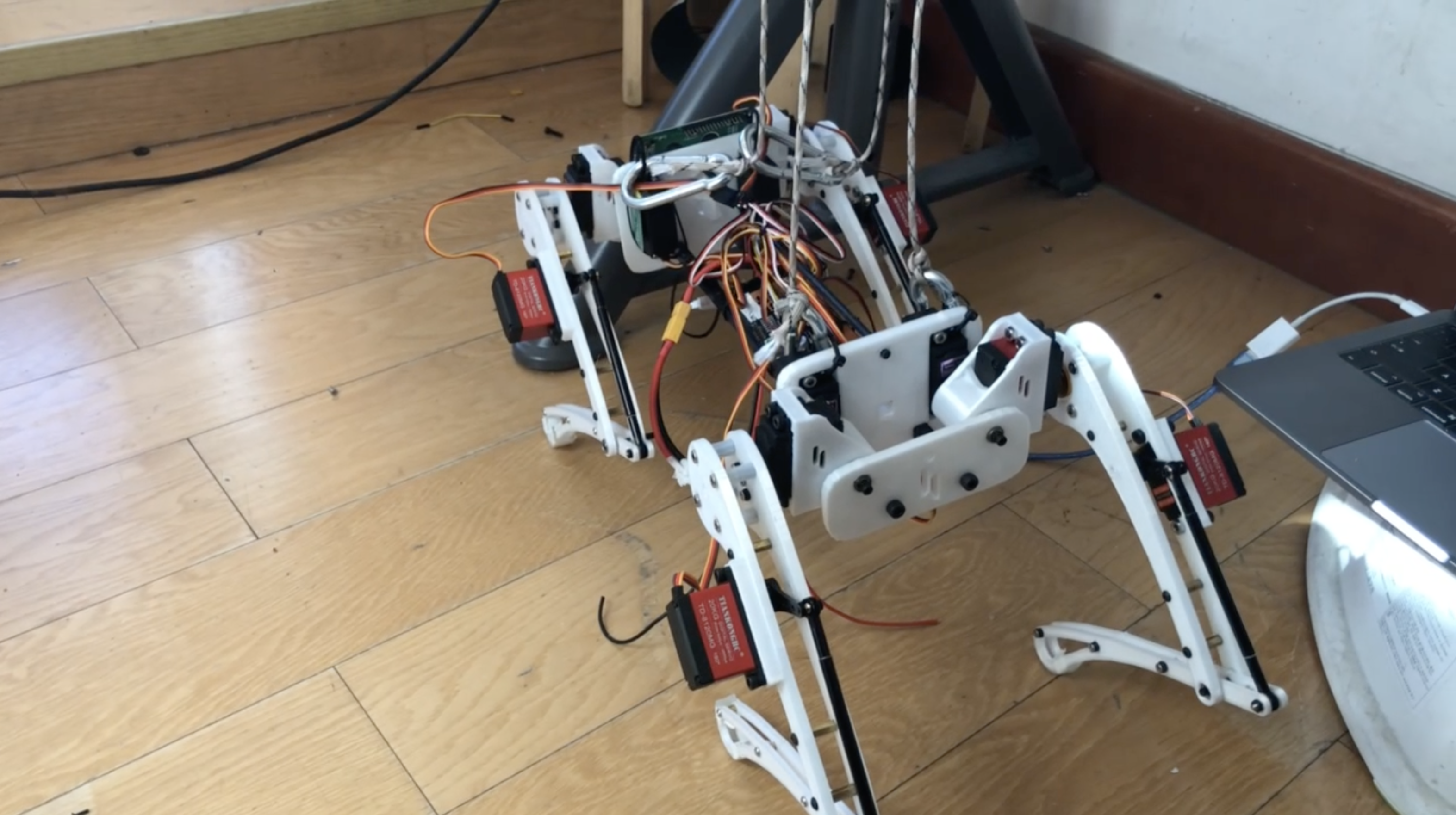
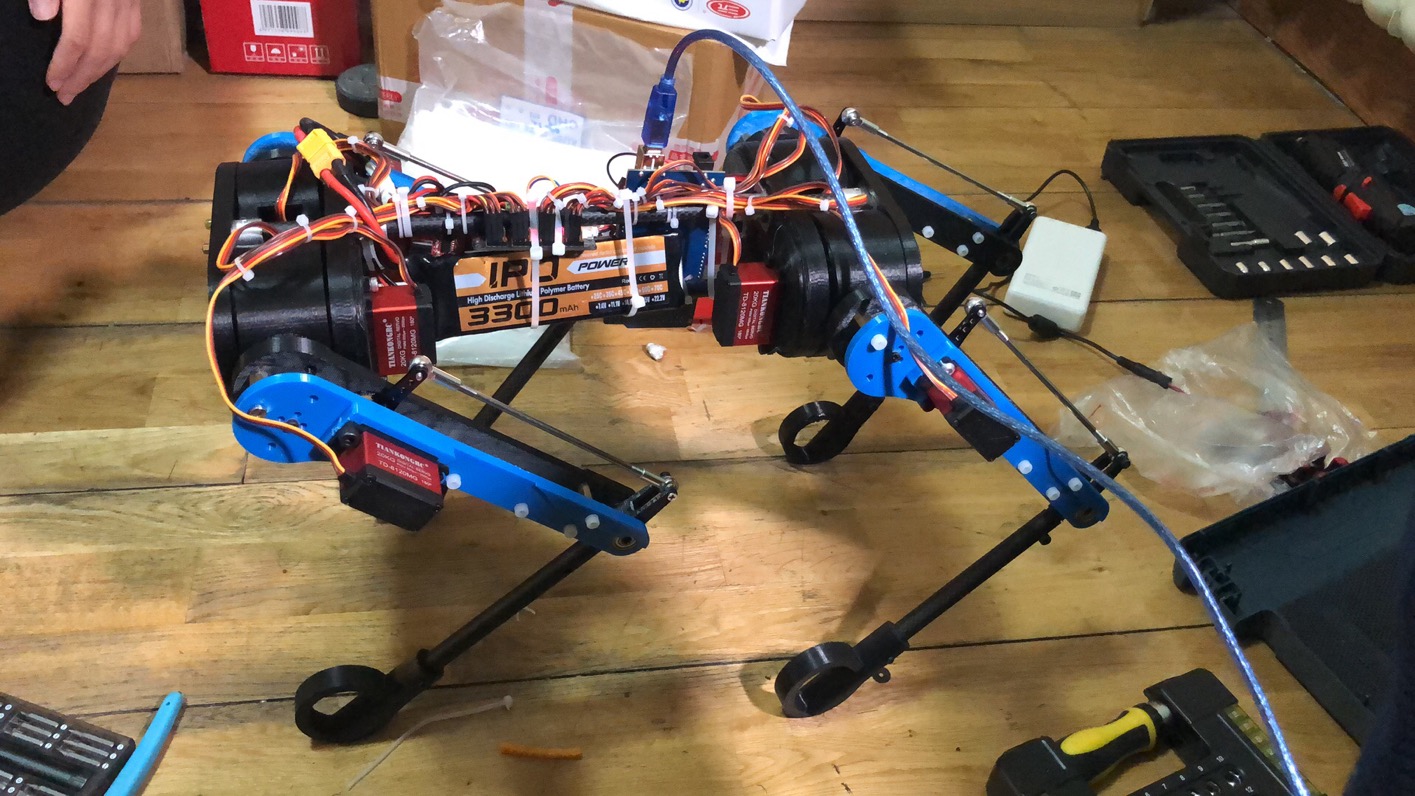
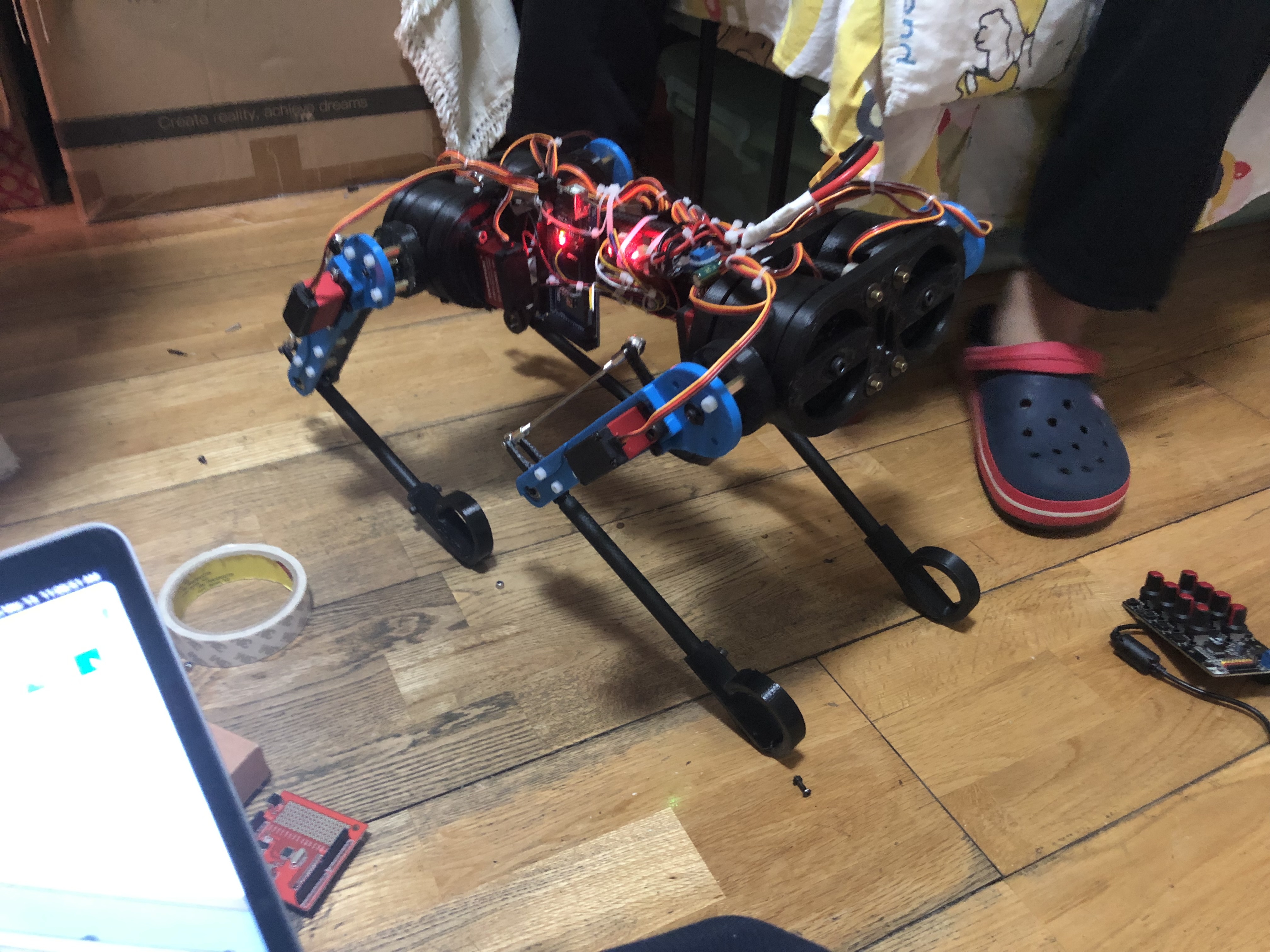
Structurally, after one year of iterative development, we adopted a hybrid construction combining 3D-printed polycarbonate and engineering plastics with carbon fiber reinforcement. High-precision servo motors provide actuation and dynamic power. A Raspberry Pi Zero 2W serves as the computational foundation, preparing the system for future graphical algorithm processing.
During structural development, we pioneered a dual-bearing joint system that significantly enhanced strength and stability. We also designed a hip joint with an exceptionally large range of motion—rooted in biomimicry yet extending beyond natural limits—enabling the execution of diverse movements and complex commands in the future.
On the software side, Hyaena is now capable of stable walking, running, pacing, human-machine interaction, and a range of foundational behaviors.
Structural Engineering Development
We utilized Autodesk Fusion 360 and MAXON Cinema 4D to design and refine the mechanical system. Across five major structural iterations, the platform evolved toward stable, fluid execution of complex commands while maximizing material strength. These developments laid a solid mechanical foundation for subsequent software integration.
Software Development
Software development was carried out on the Arduino platform. Through disciplined coding practices and systematic architectural planning, the system achieved reliable implementation of core behaviors such as stable walking and standing.
Control System Development
The robot is currently operated using the DualShock 4 controller developed by Sony. With a simple push of the joystick, the robot responds intuitively, executing movement and other basic commands in real time.
Problem Solving
Like all meaningful engineering projects, Hyaena’s development was defined by persistent challenges. Each obstacle required systematic analysis and collaborative problem-solving. The process was demanding and prolonged, but through teamwork and iterative refinement, we identified root causes, improved across disciplines, and integrated lessons learned into the final product.
The completed system reflects not only technical execution but the resilience developed throughout its creation. We take pride in that journey.
Project Outlook
The Hyaena project holds significant potential for continued development. Biomimetic robotics has long been a focus within the robotics field, attracting sustained industry attention.
Given its functional characteristics, quadruped robotic systems offer strong application prospects in unmanned operations and service sectors. Our platform includes expandable hardware interfaces and open-architecture software, establishing a foundation for future integration of artificial intelligence vision systems and advanced computational analysis.
In the broader context of automation and intelligent systems, this project positions itself as a forward-looking contribution to the field. We will continue advancing research in biomimetic robotics and look forward to future breakthroughs.